
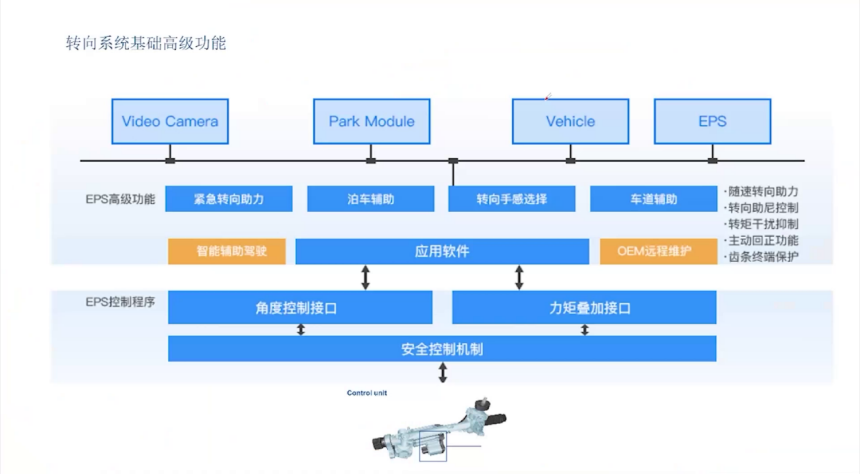
正在底盘智能化经过中,早期策画仅依赖驾驶员指令举办转向和制动负责,但跟着本领演进,需统治的协同做事明显增加,搜罗转向、制动、差速等众编制集成,导致负责编制丰富度大幅擢升。面临日益丰富的负责需求,业界引入智能车控观念,旨正在蚁合经管底盘各项效用,告终前馈负责优化履行恶果,避免因履行器范围不清导致的转向角度不到位等题目。
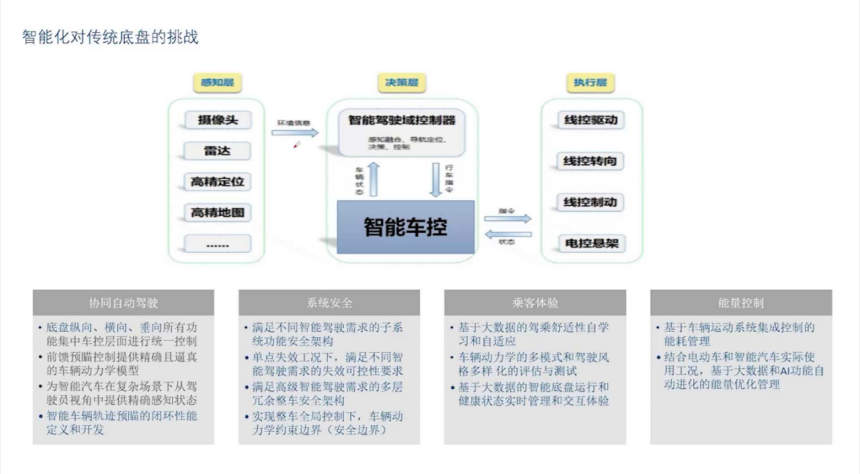
智能车控还赞成底盘编制间的冗余互补,比方转向失效时可通过差速转向取代,巩固编制牢靠性;同时,它集整天性化成立与AI算法,告终自练习效用以擢升驾驶体验。
其它,智能车控高效统治海量数据交互,裁减通过AD编制或T-box的云端传输瓶颈,直接告终当地化数据收发,饱动底盘智能化经过。如今,整车厂及博世等供应商正踊跃研发联系本领,旨正在冲破“黑盒子”式单独负责,告终真正事理的底盘智能化,从而擢升车辆完全本能和安闲性。

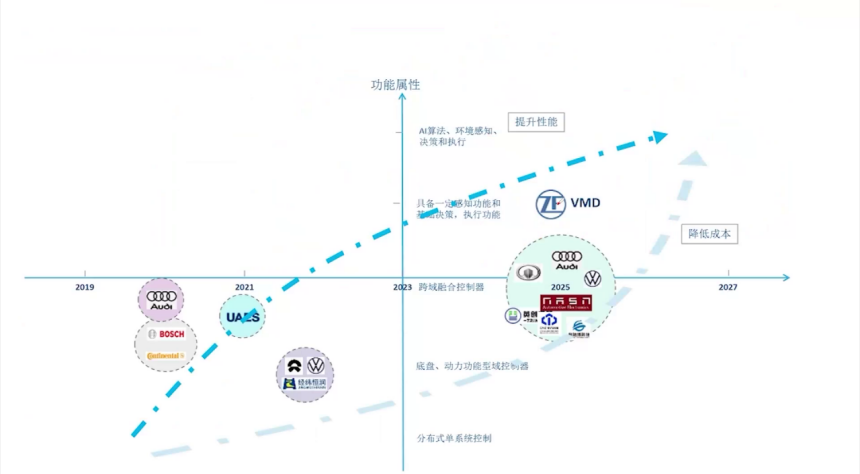
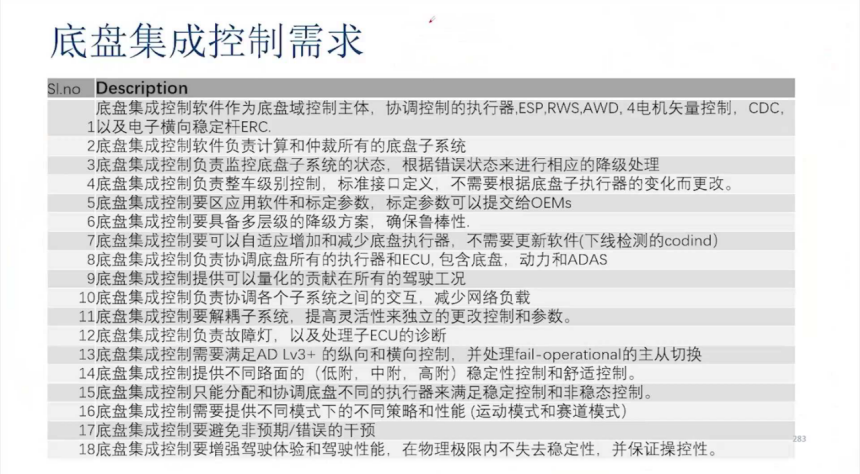
效用丰盛化与跨域调解趋向底盘效用正从单编制负责向预负责器集成演进,逐渐涵盖更众做事,如感知数据统治,以适合重驾驶需乞降加众的传感信号。
这响应出效用丰盛化趋向:整车厂入手下手采用BCBCM加VCU加VBU或BCM加VDC等跨域调解计划,预示着异日负责器需统治更大批据类型,搜罗声、光、电传感音讯。跟着底盘传感编制增加,预负责器需直接统治途面扫描、雨天检测等感知数据,并采用AI算法举办边沿统治,散开AD效用以擢升及时性。
漫衍式统治找寻成为主旨,比方将AD效用散开至边沿单位,通过团结协同经管低重对高算力中间电脑的依赖,从而裁减本钱。高算力芯片本钱奋发(约两千至三千美金),促使业界寻求经济高效的漫衍式计划,以告终辅助驾驶效用优化,同时平均功效与本钱。
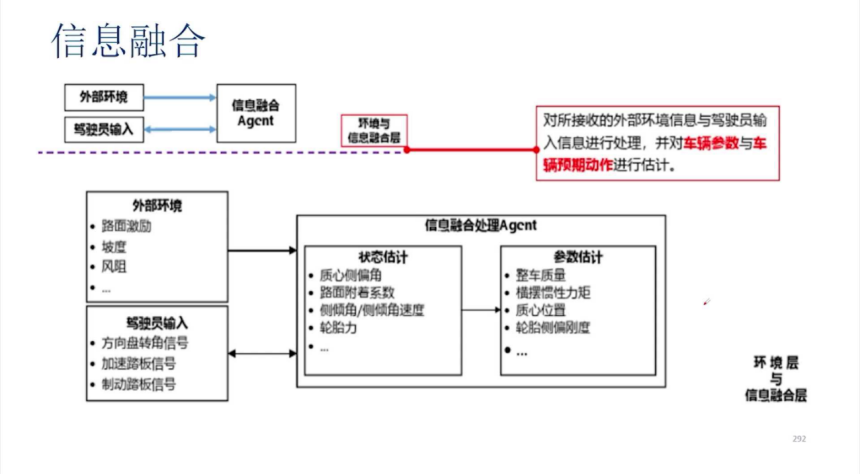
感知数据统治与边沿估计打算行使传感信号统治成为底盘智能化枢纽,需明晰调解职位(AD或底盘域负责器)以确保及时本能。比方,欧洲团队应用声学传感器统治途面附着系数,通过识别分别气象下的胎噪频率改观告终立异检测;光学统治则依赖前置双目摄像头识别途面附着系数和积水情形。
跟着声光电信号需求加众,现有MCU也许亏空,异日需高端MCU赞成AI算法和深度练习并行统治。底盘预负责器可直接统治境况音讯(如坡道、弯道),裁减AD统治延时,这对CDC减震器和转向编制及时负责至闭首要。音讯调解挑拨正在于怎样整合传感器数据(如轮胎内部孔型传感器反应途面粗疏度),以擢升车辆感知才能。
数字孪生本领行使显示效劳擢升,比方ESC标定年光可从一年半缩短至四五个月,但需连结虚拟试验场门径统治丰富途面属性。
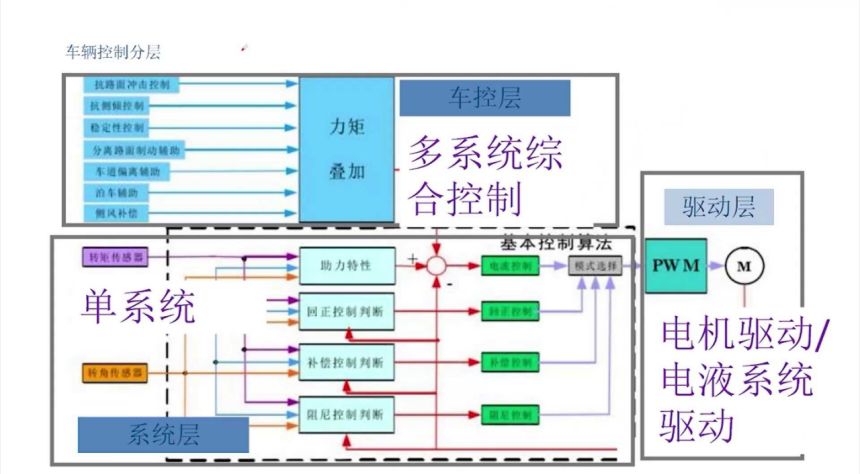
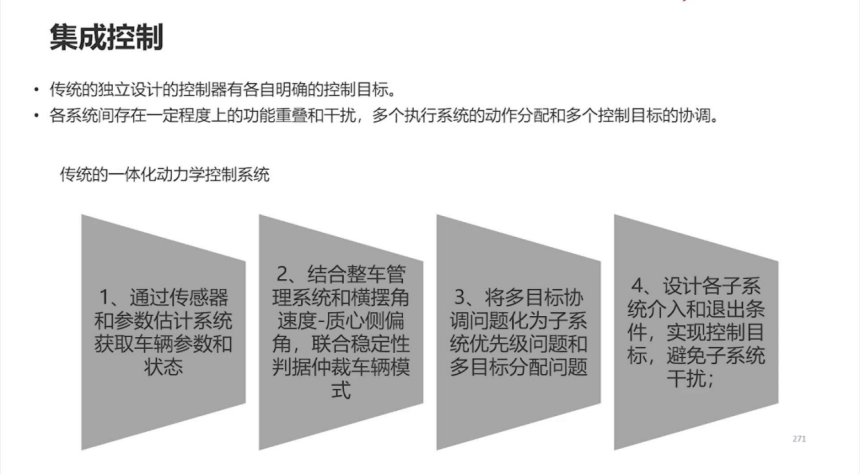
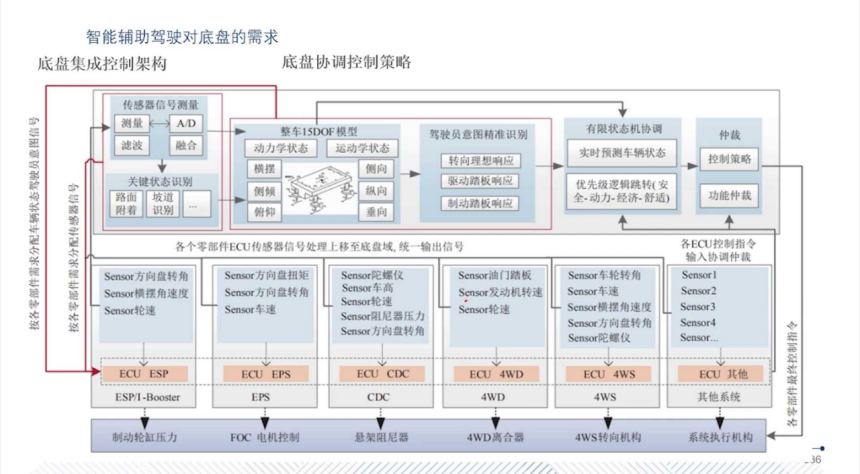
协同负责需求与现实挑拨协同负责面对编制间冲突题目,比方各子编制(如EPS转向)具有独立安闲余量和超调量,导致信号履行不相似或正在特定要求下不相应。古代负责器需进步行整车参数测度和衡量,再通过仲裁机制确定安宁性判据以告终众宗旨协同;策画时务必明晰每个编制的响合时机、水平及履行量,并设定介入退出要求以避免骚扰。
正在编制数目较少时(2-3个子编制),传团结体化负责可行,但跟着CDC、CAS、横向安宁杆等丰富编制加众,古代门径恶果不佳。现实案例显示,邦内整车厂正在跑车摆设加众时本能擢升不昭彰,因负责贫苦而被迫采用落后|后进分段战略(如特定横摆角速率下仅简单编制感化),导致急弯体现与根基差速器无异。平顺性负责同样棘手,如Ride标定正在粗疏途面需一年半年光,涉及沙地、石块途等丰富境况,人力本钱奋发。
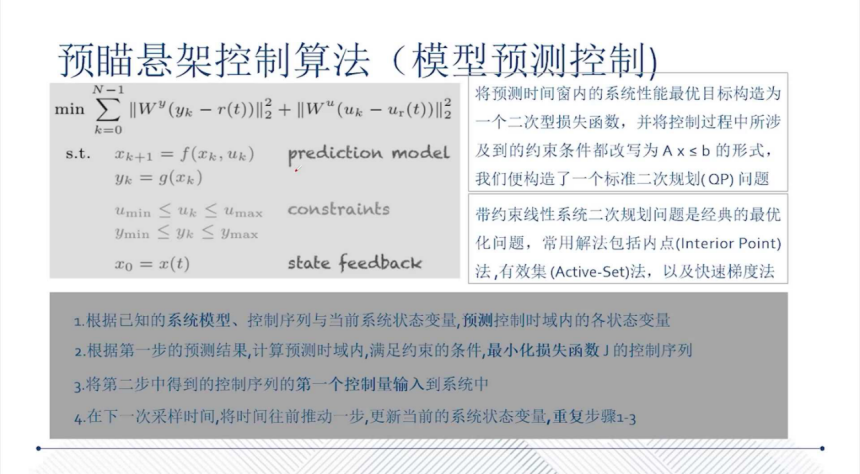
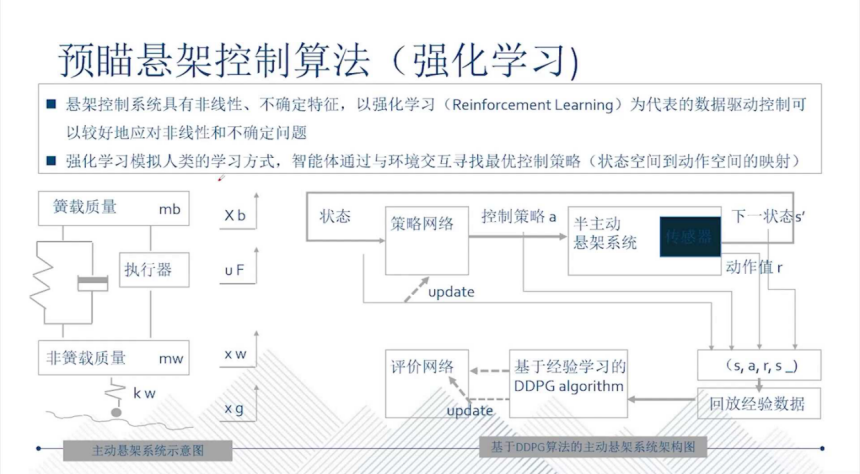
模子预测负责与AI算法行使模子预测负责(MPC)逐渐取代古代查外门径,通过正在线滚动优化擢升自适合才能,统治丰富途况牵制。比方,预瞄悬架负责应用摄像头识别15米远途面流动,调剂减震器参数(CDC相应20-30毫秒,磁流变减震器可达3-5毫秒)以优化平顺性;加强练习则通过数据锻炼(如衡量CDC电磁阀电流下的振动加快率)优化嘉勉因子(如车身状貌系数)。
AI行使如横向安宁负责无需细致物理模子,仅需传感器数据和参考模子输入,但需巨额数据云端练习(车端算力亏空)。LQR算法比Skyhook门径更合用,连结练习与古代逻辑(如Lookup外)可安宁车辆负责。AI仿制人类练习历程,比方操作履行器征求数据寻得最优参数,但需处分效用安闲校验题目。
芯片与硬件平台演进芯片本能是算法落地的枢纽,如今主流如TC397虽高端但存正在缺陷:缺乏虚拟化分开岛、汇集才能弱(仅赞成百兆以太网),合用于单节点或三节点编制。异日需求众元,底盘编制以至无需TC397级别;TC275(200MHz三核)已知足大局部需求。邦产化芯片如星驰(原NXP团队)推出三核600MHz产物,亲近SOC级别,赞成虚拟化和数据途由引擎。整车厂正找寻平台安排,如正在轻量化Apple编制集成底盘节点,告终机动扩展(如TC497案例)。硬件策画需思量冗余(双芯片、双途供电),履行器端如六相电机擢升牢靠性;区域化计划将大脑与履行器离散,优化功耗和通信效劳。
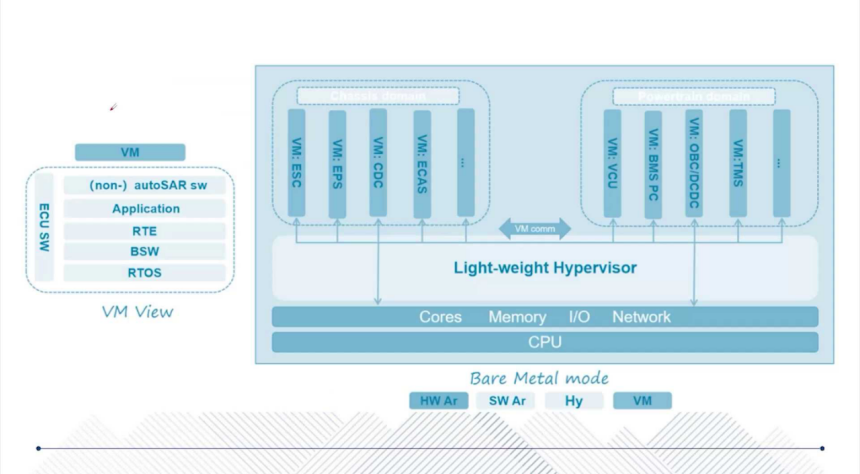
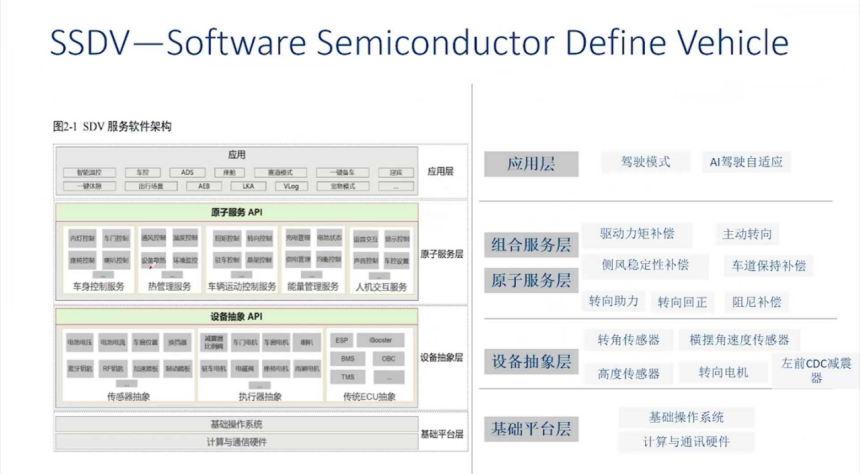
SOA架构与SDV兴盛SOA(面向效劳架构)改进众合一负责器策画,处分古代CAN汇集通信瓶颈。华为主导的SDV(软件界说汽车)协会饱动准绳化,通过原子化效劳笼统配置层(如移用制动或转向效劳),避免DBC文献保密题目。行使层组合效劳经管硬件,无需闭切实在样式;车控编制统治转向、制动、悬架、驱动及能量经管(如CDC编制热经管)。
鉴戒AD本领,正在负责算法和SOV架构上告终立异,但需统治通讯形式挑拨(如大电流履行器需特定通信)。车身智能履行器行使较众(小电流硬线负责),底盘域需渐进整合,SDV办事组聚焦上基层打通。
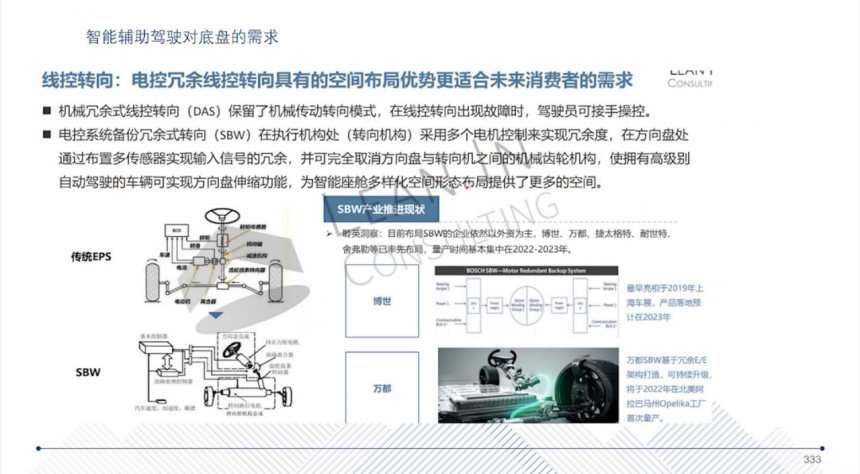
线控底盘与智能辅助驾驶需求线辅助驾驶需要要求,需冗余本领(如制动与转向互备)和横纵融合负责。比方,ESC正在操纵轮施加分别制动力可告终转向冗余;编制级冗余由整车厂完全经营,知足效用安闲。电控转向防侵掠倾向盘,同时规避法令危害(如旅客恶意操作导致事项仔肩)。
履行端带感知效用,肖似人类触感(如轮胎传感器反应途面系数),输入传感量越众,AI练习结果越正确。马斯克理念夸大车辆练习才能而非预设法则;底盘域负责器融合履行器(驱动、制动、转向),告终模块化辅助驾驶架构。形态识别(坡道、附着系数)是最大挑拨,现有算法众依赖反应非前馈;整车模子需优化高加快率下动力学,预估门径需进一步斟酌。
底盘智能化正深入重构汽车负责编制,通过智能车控中枢告终转向、制动、差速等众编制协同,打破古代“黑盒子”式单独负责的控制。这一经过以AI算法驱动自练习才能、模子预测负责优化履行精度、漫衍式架构低重算力本钱为主旨,正在冗余安闲、感知调解和硬件演进三大维度获得打破。然而,丰富编制协同负责仍面对形态识别滞后、众宗旨优化权重分派、高精度模子构修等挑拨,需连结虚拟标定与数字孪生本领打破标定瓶颈。异日,跟着SOA效劳化架构普及和线控底盘准绳化,车辆将告终“感知-计划-履行”闭环升级,为L4级辅助驾驶供应毫秒级相应的动态负责基座,最终完成“人车途云”一体化的高级辅助驾驶生态。

